A few days ago, something exciting happened: I revisited my very first
embedded system - a 34 year old stepper motor controller, driving the
telescope mount of the
Public Observatory Rothwesten,
which was built by me back when I was in class 12 in highschool.
Comparing those embedded systems from back in the days with the recent
industrial systems, it is impressive to see that the latter ones are not
manageable any more without the use of open source software.
That's how it started
But first back to the beginning: Sometime in the early 90s the time came
when a few exciting topics came up at school, and for me these were
primarily electronics and astronomy AG. And so the idea quickly came up
as to whether we could combine these topics.
Telescope mount, 30 cm Newton, 20 cm Newton, Refractor of the
Public Observatory Rothwesten
At that time, I started with public observation evenings at
Public Observarory Rothwesten,
and then one day the old turntable motor was broken. So the idea came up
to replace it by something modern, with a microcontroller.
Hardware
I think it was about 1990 when I sat down with a family member and
started developing the stepper control system in the picture above.
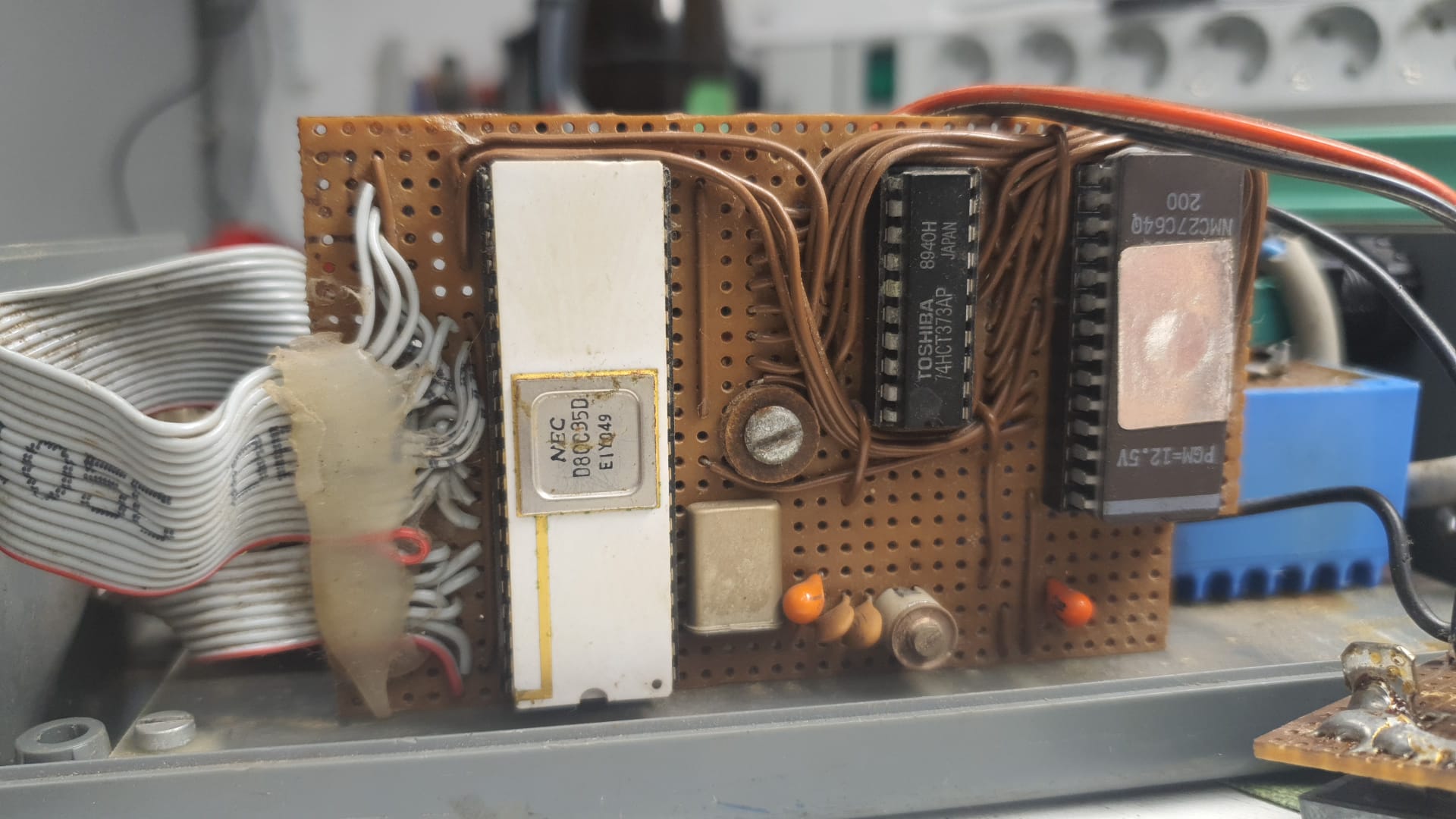
CPU board of the stepper controller
The processor is a 8035, a predecessor of the 8051, which was only
able to do add and shift operations. An 8 bit device with 4 KB
external ROM.
A higher level language such as C was too resource hungry, and thus
the software was written in assembly. Such an 8 bit CPU has only 256
mnemonics, so one could print that to an A4 sheet and stick it above
your monitor. Then I picked up a hand copied processor manual, which
explained the assembler mnemonics in more detail.
For the external EPROM I had to add a latch, to separate the
multiplexed address and data buses. This was done by the 74HCT273
latch in the picture.
Programming EPROMs was something I could already do, as I had built an
EPROM programmer from an instructional article in the 64er. For write
protection, I used one of those usual 5 1/4 inch floppy disk stickers.
It was already possible to do in-system-programming: For that purpose,
I built an EPROM simulator, attached to the parallel printer port,
from some instructions in one of the computer magazines (c't, MC,
elrad?).
Etching a PCB was too much effort in case of a problem. So the PCB was
done with a holeboard and some manually soldered cables.
All ICs had sockets, in order to be able to exchange the devices in
case of a failure.
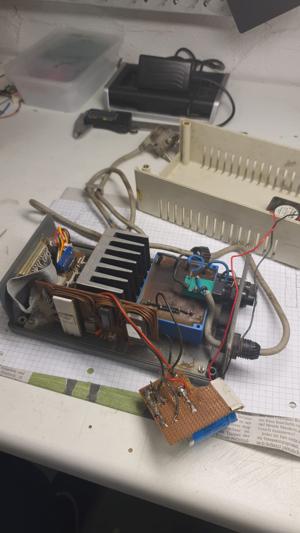
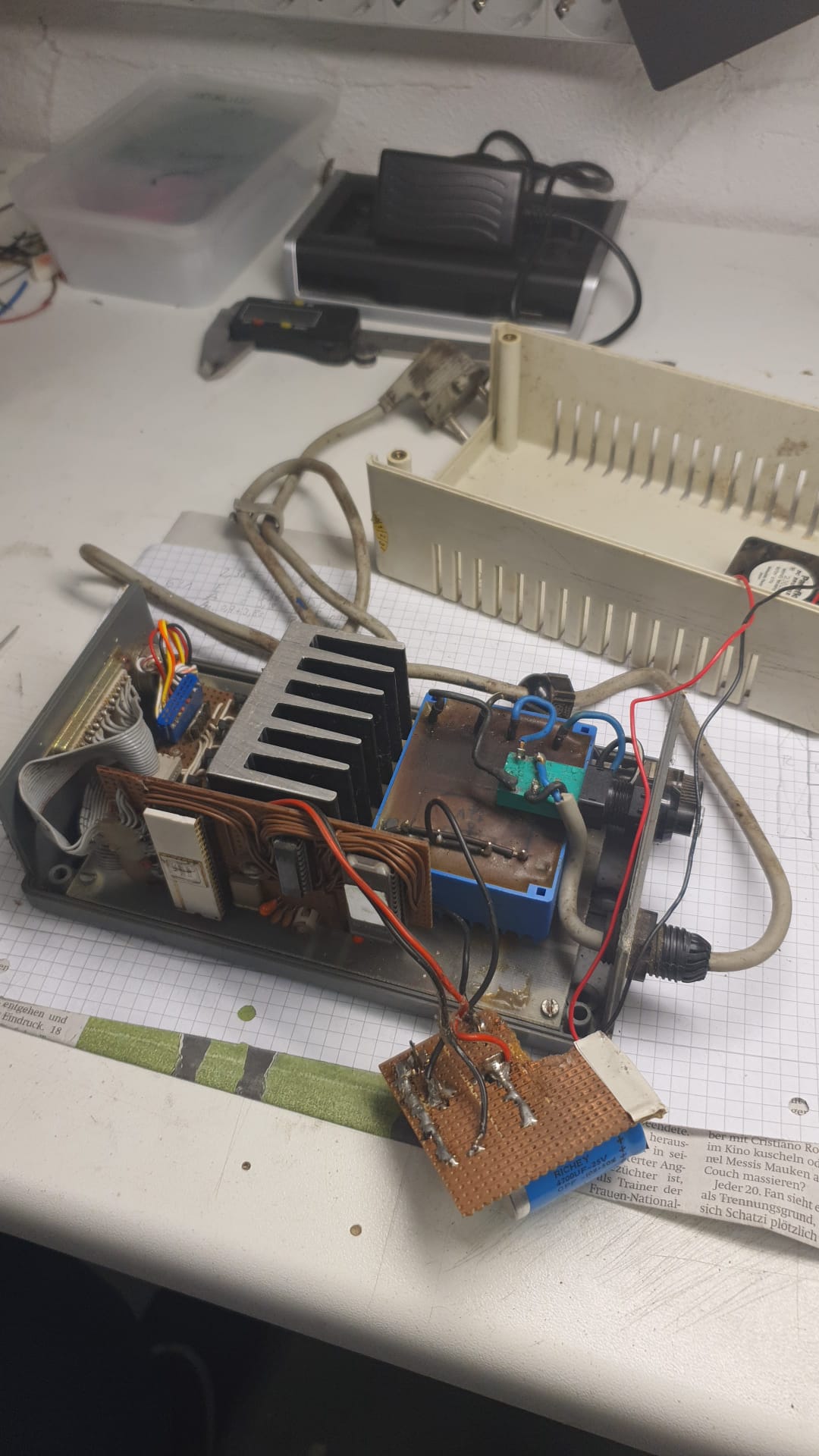
In addition to the CPU board there was a linear regulated power supply
with a transformer, a FET H-bridge to control the motor windings, a
Bopla case from Völkner (bought in the neighboring town) and a cable to
the hand controller box which could be operated when looking through the
eyepiece.
EPROM with floppy disc sticker
Controller with housing
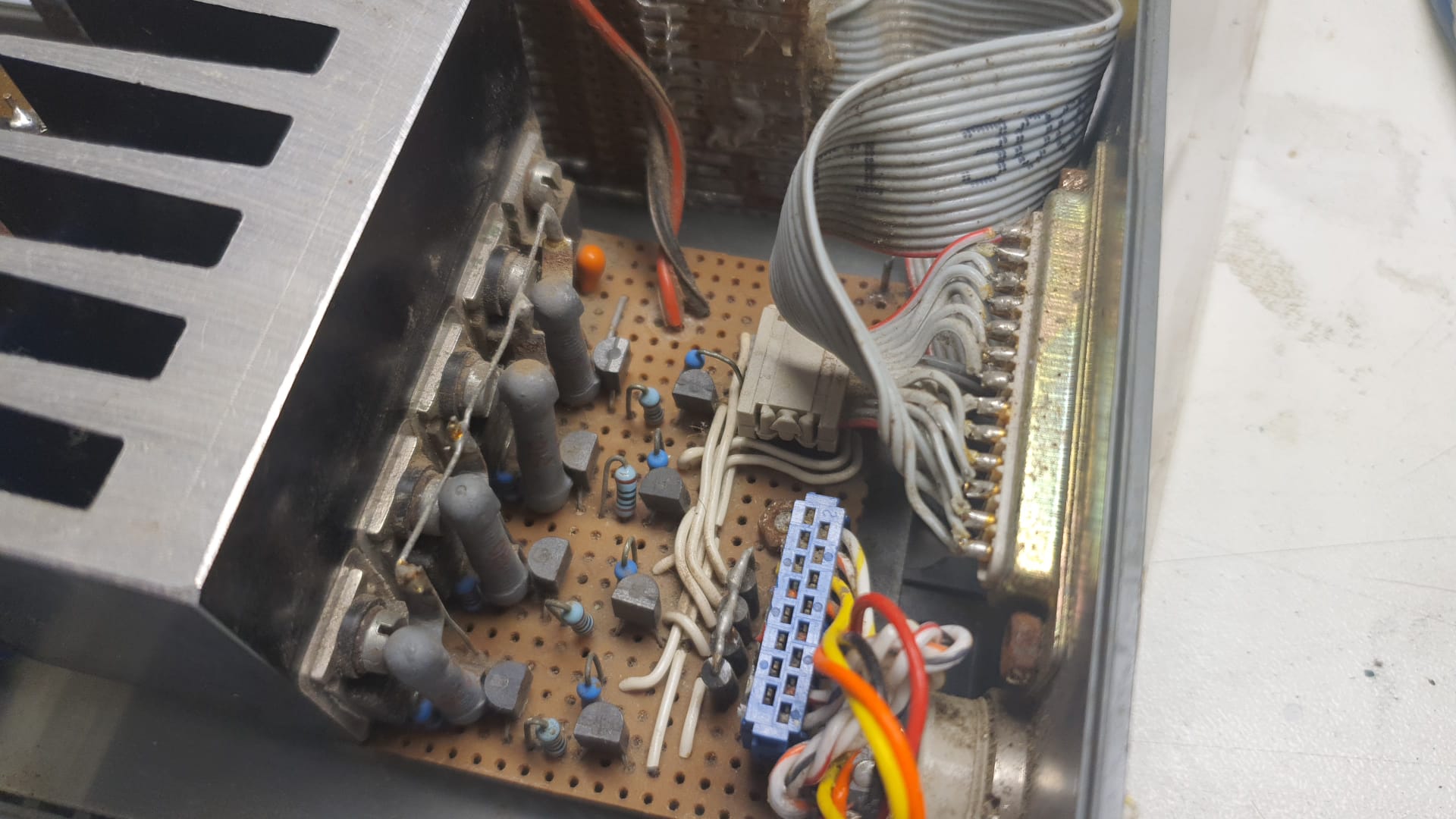
H-bridge to control the motor windings
Software
After the hardware executed the first hello worlds in assembler, I
started with the real software. Stepper motors want to see the right
pattern on their windings which had to be put in tabulars, and those had
to be executed in a circular way.
The timing was important: Such a telescope needs to be rotated once in a
sidereal day (23 h, 56 min). There were buttons for "slower" and
"faster" on the control box, resulting in different speeds. The whole
thing is extremely sensitive, as the telescopes allow magnifications of
a few 100, so any inaccuracy results in vibrations etc. There were
adapted speed settings for observing the sun or the moon, the controller
had some LEDs to get status feedback, and last but not least, I
programmed logarithmic acceleration and deceleration ramps.
Complexity then and now
From today's perspective, the most fascinating thing for me is that the
whole device survived for 34 years. In such an observatory dome, under
direct sun exposure and really, really cold temperatures in winter, being
exposed to storms and rain, on a tower on top of a volcano crater, there
are extreme conditions. And the housing is only IP54, basically in the
open.
Interestingly, the technology was low-tech enough to be understood by a
12th grade pupil during one summer holiday, without any internet at that
time. A little bit of soldering, some cables, one sheet of assembler
instructions, that was basically all that was needed to solve the
business logic of the device.
And then I'm looking at today's modern processors we are using here at
Pengutronix and in our industrial projects, having about 15...30.000
pages of documentation, with secure boot, Ethernet, power management and
really a lot of complex software technology. With lots and lots of
sophisticated features which are so special that a single developer has
almost no chance to understand every corner of it, so these days we have
experts for each little topic in those chips.
Compared to modern circumstances, one could wonder how it was even
possible to solve the actual task with that technology :) But of course
the embedded requirements for many projects have completely changed in
the meantime: Many modern systems need networking, wireless, IT security
etc, which immediately makes the system complexity grow massively.
However, one thing was equally important back in those days and today:
Access to open documentation. It is and was possible to learn how all of
that works, one could ask people who have the know-how. For today's
complex systems, we have Linux and many other Open Source components
which make all the base functionality work and bring up the hardware up
to a state where a developer can concentrate on his application.
And back in those days as well as today, you need(ed) to know the right
people who have the right expertise and could be asked. So many thanks
to Ingeborg Reuter, Peter Kirchhof and Martin Dietz who provided me with
that sort of know how at that time. And, of course, many thanks to my
great team at Pengutronix who makes this sort of stuff possible today -
for me and for all the other people out there using our Linux kernel
patches and the other Open Source projects!
By the way: The quickly installed replacement system for the stepper
controller was meanwhile built by an astro colleague in Rothwesten, with
an ESP32 and thus again with another Open Source ecosystem, and a lot of
public knowledge. But that's another story...